This work is a part of an ongoing effort dealing with multimodal perception and the integration of visual and haptic information, in order to provide fulfilling Virtual Environments (VEs). It is particularly devoted to developing pseudo-haptic systems, which could be defined as "systems providing haptic information generated, augmented or modified, by the influence of another sensory modality".
1. GLOBAL DESCRIPTION
The use of haptic interfaces might remain limited for a long time yet because it is expensive and complicated to use. In order to simulate haptic sensations without haptic interfaces, several researchers have thus proposed other solutions such as sensory substitution, passive interfaces (or “props”), or what we called "pseudo-haptic feedback".
Pseudo-haptic feedback was initially obtained by combining the use of a passive input device with visual feedback. It was used to simulate haptic properties such as stiffness or friction. For example, to simulate the friction occurring when inserting an object inside a narrow passage, we proposed to artificially reduce the speed of the manipulated object during the insertion. Assuming that the object is manipulated with an isometric input device, the user will have to increase his/her pressure on the device to make the object advance inside the passage. “The coupling between the slowing down of the object on the screen and the increasing reaction force coming from the device gives the user the illusion of a force feedback as if a friction force was applied to her/him” [1].
Pseudo-haptic effects have intuitively been used in different applications such as videogames. For example, during a driving simulation, if the car passes over the grass, the gamer must force on his/her input device to bring the car back to the main road. This effect provides the gamer with the sensation of being “glued” to the grass.
2. FIRST EXPERIMENT
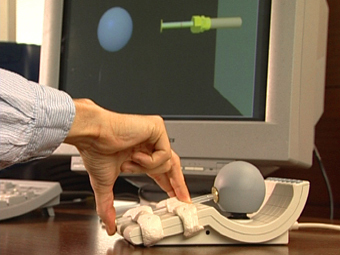
A first study [1] demonstrated that a passive isometric input device such as the Logitech Spaceball (see Figure 1) used together with appropriate visual feedback, could provide the operator with a pseudo-haptic feedback. During a psychophysical experiment, various subjects were indeed able to compare the stiffness of real springs and virtual ones - i.e. simulated with a pseudo-haptic feedback.
Pseudo-haptic feedback was accompanied by several sensory illusions.
A surprising result was the high value found for the Point of Subjective Equality when discriminating between a real spring and a virtual one. (The PSE represents the value of the compared stimulus subjectively perceived as being equal to the stimulus of reference. In this particular experiment, the PSE was a "visual PSE", since it corresponded to the "visual stiffness" of the virtual spring for which the virtual spring was perceived as equally stiff as the real one.).
3. SECOND EXPERIMENT
A second experiment [2] was designed to study the phenomenon of illusion which occurs with the pseudo-haptic feedback, and to identify the moment when this illusion occurs : the "boundary of illusion".

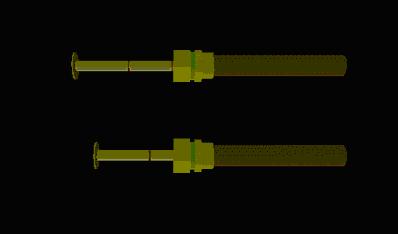
The subjects were given the task of deciding which of two virtual springs is the stiffer, these springs being simulated with a PHANToM force feedback device and displayed on a monoscopic computer screen. The first spring has a realistic behavior since its visual and haptic displacements are identical. The second spring - the pseudo-haptic one - is stiffer, on a haptic basis, but sometimes less stiff, on a visual basis.
The data collected allowed us to calculate the visual Point of Subjective Equality (PSE) between the two springs, which represents the boundary of the sensory illusion. On average, a high value of PSE turned out to be -24%. This value increases monotonically when the haptic difference between the springs increases. This implies that more visual deformation is necessary to compensate large haptic differences and qualifies the notion of visual dominance.
However, this boundary varies greatly depending on the subjects and their strategy of sensory integration. The subjects were sensitive to this illusion to varying degrees. They were divided into different populations from those who were "haptically oriented" to those who were "visually oriented"
This work was achieved, in collaboration with EADS CCR,
INRIA (i3D Group) and LRP.
> back to Anatole Lécuyer's homepage
- [1] A. Lécuyer, S. Coquillart, A. Kheddar, P. Richard and P. Coiffet, "Pseudo-Haptic Feedback : Can Isometric Input Devices Simulate Force Feedback?", IEEE Int. Conf. on Virtual Reality, pages 83-90, New Brunswick, US, 2000
- [2] A. Lécuyer, J.M. Burkhardt, S. Coquillart, and P. Coiffet, "Boundary of Illusion" : an Experiment of Sensory Integration with a Pseudo-Haptic System, IEEE Int. Conf. on Virtual Reality, pages 115-122, Yokohama, Japan, 2001
- [3] A. Lécuyer, S. Coquillart and P. Coiffet, "Simulating Haptic Information with Haptic Illusions in Virtual Environments", NATO RTA/Human Factors & Medicine Panel Workshop, The Hague, The Netherlands, 2000
- these 3 publications are available here
> back to Anatole Lécuyer's homepage