I am a PhD candidate at Inria Center in Rennes, and a member of Rainbow team which is specialized on Robotics, Computer Vision and Crowd Simulation.
My PhD (supervised by Julien Pettre), is a part of CrowdBot project, a H2020 European project, aiming to develop platforms and algorithms to ensure safe navigation of social robots.
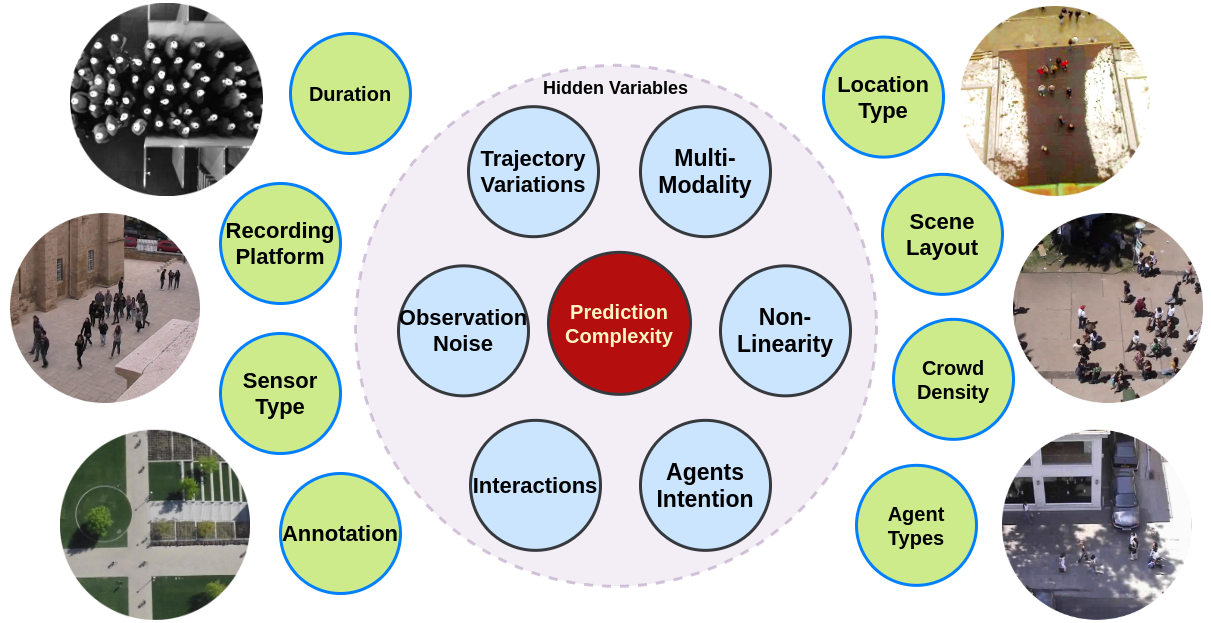
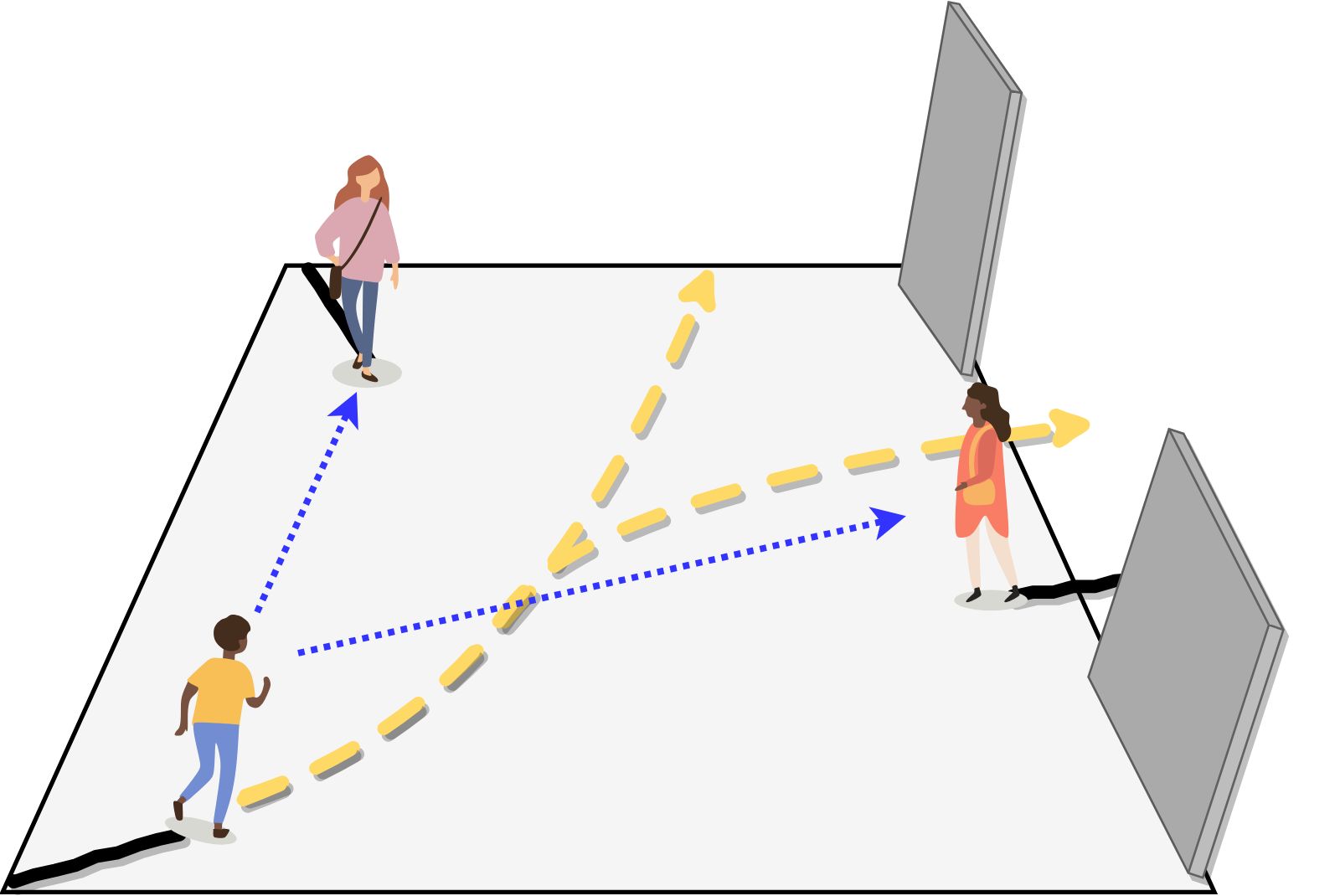
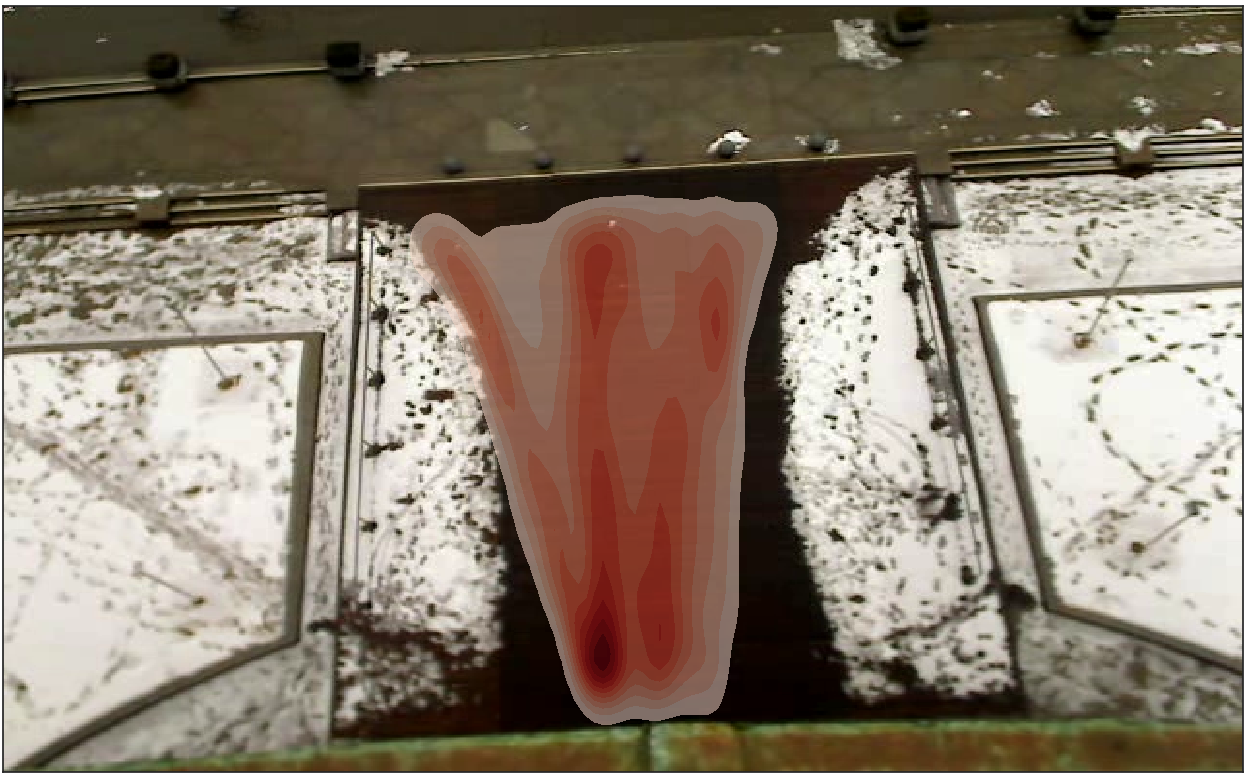
My main task is to develop tools for "Trajectory Prediction" of the agents around the robot, in order to improve the robot navigation in crowded environments.
For that, I'm working with Crowd Simulation algorithms and developing Deep Learning models.
We hope that this work, will also help to handicap people, by improving the performance of Semi-Autonomous Wheelchairs.
Before joining Inria, I was studying AI in Sharif University of Technology in Iran, followed by working in start-up companies in Tehran.
You can find my CV here.
I'm also intrested in travelling and photography. You can check out some of my photos on Flicker, Unsplash, or Instagram.
I'm also writing / translating about AI and Technology. Here you can find some of my posts (in Persian).